Гироскутер, хотя его устройство кажется многим сложным, можно сделать своими руками. Для реализации поделки понадобятся два электродвигателя. Их мощности должно хватать, чтобы перевозить человека. Ее достаточно 350 Вт.

Не обойтись без двух одинаковых колес. Их диаметр – 10…12″. Лучше, при возможности, приобретать большие по диаметру – они позволяют более свободно разместить электронику, придадут устройству лучшую проходимость.

Из аккумуляторов подходят свинцово-кислотные, имеющие мощность не менее 4400мА·ч. Батарей нужно две.
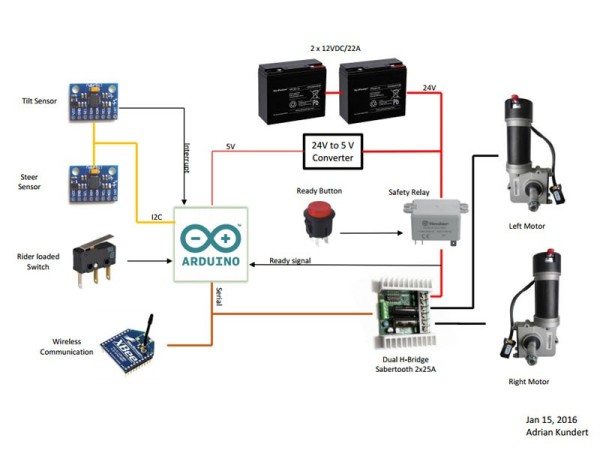
В гироскутере нужен микроконтроллер, который будет управлять устройством. Подходит от Arduino марки UnoNano. Запасаемся также дополнительным чипом ATmega 328, задача которого – обрабатывать информацию.
Аккумуляторы соединяют последовательно, получая на выходе необходимое для гироскутера напряжение. Снабжают его кнопкой готовности, которая будет включать при нажатии питание двигателей. Если снять с кнопки нажатие, то двигатели перестают работать и гироскутер останавливается. Система обеспечивает безопасность езды.
Микроконтроллер, обладающий скоростью 38400 БОД, связывают последовательной цепью со схемой XBee. Для считывания положения платформы ее снабжают двумя гироскопическими датчиками InvenSense MPU6050, которые устроены с использованием модулей GY-521. Датчики размещают на дополнительных платах, задача которых – обрабатывать первичную информацию. В схеме пользуются шиной I2C, обладающей достаточной пропускной способностью.
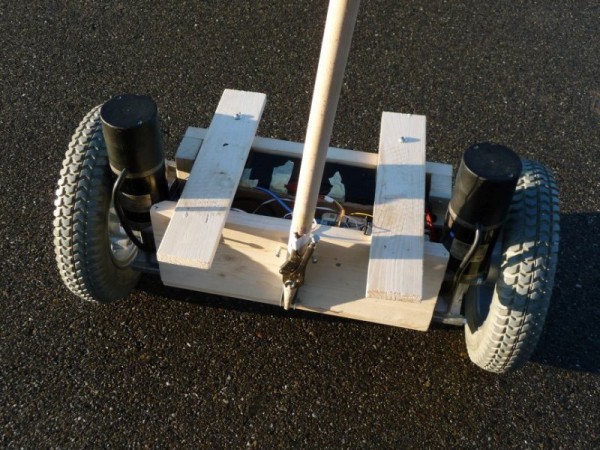
Платформу гироскутера делают из доски. На ней снизу размещают электродвигатели, связанные с установленными по бокам колесами. Для вертикальной ручки подходит обычная палка из дерева; ее крепят к платформе в передней части.
Аккумуляторы размещают строго посередине платформы, делая для них специальный короб. Двигатели устанавливают по краям основы, стараясь сделать это на одинаковом расстоянии от центра. Кнопку управления гироскутером размещают на верхней части вертикальной ручки. Кнопку в дальнейшем можно перенести на опорную площадку, ее можно настроить на отключение/включение при определенном угле наклона платформы.
Датчики, отвечающие за балансировку, устанавливают вдоль платформы или параллельно земле. Расположение датчиков поворота – под прямым углом к гироскопическим датчикам.
Дальше следует провести настройку датчиков, пользуясь программой ArduinoTerminal.